Caricatore di piattaforma da camminata militare. Piattaforma di chiosco. "Le auto marziane" hanno un'elevata permeabilità
I designer moderni lavorano sulla creazione di macchine (incluso il combattimento) con piattaforme a piedi. Sviluppi seri conducono due paesi: USA e Cina. Gli esperti cinesi lavorano sulla creazione di un BMP a piedi. Inoltre, questa macchina sarà in grado di camminare lungo le alte montagne. Il poligono per testare tale macchina potrebbe essere Himalaya.
"Le auto marziane" hanno un'elevata permeabilità
"Vicino al treppiede sembrava persino estraneo a me, ovviamente, era un'auto gestita. Macchina con una suoneria di metallo, con tentacoli lucenti lunghi flessibili (uno di loro afferrò il giovane pino), che ha caduto e minacciato, colpendo lo scafo. Il treppiede, a quanto pare, ho scelto la strada, e la copertura di rame è stata presentata in direzioni diverse, ricordando la testa. Una tessitura gigante da alcuni metalli bianchi, come un enorme cestino da pesca, era attaccato al dispositivo di raffreddamento della macchina, simile a a cestino da pesca enorme; dalle articolazioni dei mostri, scoppiavano i club di fumo verdi. "
Tale scrittore inglese ci ha descritto le navi marziali di Herbert Wells piantate sulla Terra Martian e ha concluso che per il quale le ragioni del Mrsian sul suo pianeta per qualche motivo non hanno pensato alla ruota! Oggi vive oggi alla domanda "Perché non hai pensato" sarebbe più facile per lui rispondere, dal momento che oggi sappiamo molto più di 100 anni fa.
E i Wells Martian avevano tentacoli flessibili, mentre con noi, persone - mani e gambe. E i nostri arti sono adattati alla natura stessa per movimenti circolari! Questo è il motivo per cui la persona ha inventato il diritto a mano e ... una ruota del piede. Metti il \u200b\u200bcarico sul tronco e il rotolamento, i nostri difetti erano naturali, beh, e poi hanno pensato di tagliarlo sui dischi e aumentare le dimensioni. È così che è nata l'antica ruota.
Ciò è appena uscito che sebbene gli equipaggi ruoti possano essere molto ad alta velocità - come evidenziato dal record di velocità sulla Terra 1228 km / ora installata sull'automobile reattiva il 15 ottobre 1997, - la loro permeabilità è molto limitata.
Bene, le gambe e le zampe ti permettono di muoverti ovunque con il successo. Il ghepardo corre velocemente, e Chameleon è anche appeso parete verticaleE anche anche sul soffitto! È chiaro che una vera vettura così simile, probabilmente, non avrà bisogno di nessuno, ma ... un'altra cosa è importante, vale a dire, che i veicoli con un'elica ambulante hanno da molto attirare l'attenzione degli scienziati e dei designer del mondo intero. Una tecnica simile almeno nella teoria ha una maggiore permeabilità rispetto alle macchine dotate di ruote o bruchi.
Gamma: questo è un progetto costoso
Tuttavia, nonostante le elevate caratteristiche attese, le occasioni non sono ancora state in grado di andare oltre i limiti dei laboratori e dei poligoni. Cioè, sono usciti e l'American Agency Darpa ha anche mostrato tutto il rullo su cui robot Moul si muove attraverso la foresta con quattro zaini nella parte posteriore e allo stesso tempo in modo costante seguito da una persona. Essendo caduto, un tale "mulo" è stato in grado di alzarsi in piedi, mentre una macchina da bruco sopraffatta non può! Ma ... le vere possibilità di tali apparecchiature, soprattutto se li valutiamo dal criterio "efficacia dei costi" molto più modesto.
Cioè, il "mulo" si è rivelato molto costoso, e non troppo affidabile, e, non meno importante, possiamo indossare zaini in altri modi. Tuttavia, gli scienziati non smettono di lavorare sulla tecnica promettente con questa propulsione insolita.
Gli ingegneri cinesi sono stati impegnati tra diversi altri progetti. Dare Jinsong e un certo numero di dipendenti dell'Università Tecnologica Nanjing stanno studiando le possibilità e le prospettive di macchine con un'elica da passeggio. Una delle direzioni di ricerca è quella di studiare la possibilità di creare un veicolo da combattimento basato su una piattaforma a piedi.
Nei materiali pubblicati, sia la cinematica della macchina che gli algoritmi del suo movimento sono considerati, sebbene il suo prototipo stesso esista solo sotto forma di disegni. Alla fine e lei aspetto, e tutto caratteristiche tattiche e tecniche può essere seriamente cambiato. Ma oggi sembra una piattaforma polpa, portando una torre con un cannone automatico. Inoltre, la macchina è dotata di supporti per una maggiore stabilità durante la ripresa.
Con un tale layout, è chiaro che il motore sarà nella parte posteriore del corpo, la trasmissione vai oltre i lati, il reparto di combattimento è nel mezzo di lui, e il dipartimento di controllo, come il serbatoio - davanti. Ai lati, ha "gambe" a forma di G, disposte in modo tale che l'auto possa sollevarle, trasferire in avanti e abbassando la superficie. Dal momento che otto zampe, in ogni caso ci saranno quattro gambe di otto, e aumenta la sua stabilità.
Bene, come si muoverà - dipenderà dal lato del computer, che controllerà il processo di movimento. Dopotutto, se le "gambe" riorganizzeranno l'operatore, allora ... è semplicemente confuso in loro, e la velocità della macchina sarà solo una tartaruga!
Raffigurato su disegni pubblicati combattimento Ha un modulo di combattimento disabitato, armato con un cannone automatico da 30 mm. Allo stesso tempo, deve essere dotato di un insieme di attrezzature, che consentirà al suo operatore di osservare l'ambiente circostante, tracciare e attaccare gli obiettivi rilevati.
Si presume che questo portiere avrà una lunghezza di circa 6 metri e una larghezza di circa 2 m. La massa di combattimento è ancora sconosciuta. Se queste dimensioni sono osservate, questo ti permetterà di creare un'auto trasportabile aria e sarà trasportata da aerei da trasporto militare e elicotteri pesanti del trasporto.
Cosa dire: questo sviluppo di specialisti cinesi è di grande interesse dal punto di vista della tecnologia. Insolito per auto militare, un'elica da passeggio, teoricamente, la macchina garantirà le elevate caratteristiche della performance come sulle superfici tipi diversiE in una varietà di sollievo, cioè non solo sulla pianura, ma in montagna!
E qui è solo molto importante che stiamo parlando delle montagne. Sull'autostrada e anche semplicemente su terreno pianeggiante, la ruota e la macchina cingolata è probabilmente più redditizia della passeggiata. Ma in montagna, la passerella può essere molto più promettenti auto tradizionali. E la Cina ha un territorio montuoso molto importante in Himalaya per lui, in modo che l'interesse per questo tipo di macchine sia piuttosto spiegato per questa regione.
Sebbene nessuno negasse che la complessità di tale auto sarà alta, ma affidabilità è improbabile che si confronta sia con la stessa sedia a rotelle. Dopotutto, ci sono otto sfide su di esso contemporaneamente con gli azionamenti, i sensori di inclinazione e i giroscopi saranno molto più complicati di qualsiasi propulsione a otto ruote.
Inoltre, è necessario utilizzare uno speciale sistema di controllo elettronico, che dovrebbe valutare in modo indipendente la posizione della macchina nello spazio e la posizione di tutte le sue gambe sostanze, e quindi gestire il proprio lavoro in conformità con i team del conducente e il dato Algoritmi di movimento.
Vero, sui regimi pubblicati Si può vedere che le unità complesse sono disponibili solo sulle parti superiori del movimento dell'elica della macchina. Le parti inferiori di loro sono fatte estremamente semplificate, a proposito, allo stesso modo delle gambe del Darpa "Mule". Ciò consente di semplificare il design della macchina e del sistema di controllo, ma non può peggiorare la sua permeabilità. Prima di tutto, influenzerà la capacità di superare gli ostacoli, la cui altezza massima può essere ridotta. È anche necessario pensare a quale tipo di rotolo, questa macchina sarà in grado di lavorare senza paura di girare.
Mou "Sozhinsky Middle School SchoolnOME ILYA RAID.

N. 5 febbraio, 2011 Prodotto dal 2005  Alla vigilia del 23 febbraio, la scuola è stata organizzata dal caso collettivo-creativo "Countrymen nel servizio". Gli studenti per una settimana riuniti regali ai loro compatrioti, laureati della Sorzhin School, che serve nei ranghi delle forze armate della Federazione Russa. Le pareti della scuola decorano la carta su cui le stelle sono segnate da ragazzi di giovani uomini. Attualmente, 3 laureati sono serviti nell'esercito: Dmitry Petrov, Yuri Petropavlovsky e Dmitry Groshev. Ci congratuliamo con questi giovani il giorno del difensore della patria!
Alla vigilia del 23 febbraio, la scuola è stata organizzata dal caso collettivo-creativo "Countrymen nel servizio". Gli studenti per una settimana riuniti regali ai loro compatrioti, laureati della Sorzhin School, che serve nei ranghi delle forze armate della Federazione Russa. Le pareti della scuola decorano la carta su cui le stelle sono segnate da ragazzi di giovani uomini. Attualmente, 3 laureati sono serviti nell'esercito: Dmitry Petrov, Yuri Petropavlovsky e Dmitry Groshev. Ci congratuliamo con questi giovani il giorno del difensore della patria!
Uomini di debito, debito di un soldato -
Servizio a casa da portare
Quindi, tutti sono comprensibili:
La scelta è fedele a te!
In inverno, verrà utilizzata primavera.
Estate, autunno, di nuovo inverno -
E casa! E ci sono parenti
Dal soldato è pazzo!
C'è famiglia, amici, lavoro.
La casa più calda del mondo ...
Non dimenticare più foto
Inserisci nell'album Demobel!
Dmitry Petrov.

Dopo la scuola, Dima ha studiato in PU-55 G. Kharovsk. Il 13 luglio 2010 è stato chiamato nei ranghi delle forze armate della Federazione Russa. Il servizio si svolge a Pskov, nelle truppe aeree. Scopata sulla lealtà verso la madrepatria il 17 luglio. All'inizio, come dice Dima, è stato difficile, ma difficoltà solo HARDE il personaggio maschile. Nell'esercito ci sono molti sforzi fisici, meno tempo per dormire. L'estate calda ha fatto anche i propri aggiustamenti: è molto difficile stare al raid in questo tempo per alcune ore. Una parte in cui DUS serve è piuttosto grande, ad esempio, per arrivare alla sala da pranzo, devi andare a 1,5 km. I soldati hanno camminato per il pranzo, la cena edificio e con una canzone, quindi il giovane cominciò a conoscere molte canzoni patriottiche. Dima ha già fatto diversi salti paracaduti. All'inizio, come dice il giovane, è stato spaventoso, ma la cosa principale è quella di raccogliere, non perdersi. E poi è già interessante, quindi il paracadute di Dime salta come. Dietro le spalle mezzo anno di servizio, ora Dima è nei campi dell'esercizio, dove rimarrà 1,5-2 mesi. Anche se ti sei abituato al giovane con la vita dell'esercito, ma, naturalmente, voglio andare a casa, a parenti, amici, amici.
Materiale fornito da Olga Sergeyevna Petrova
Nella foto: giuramento dima
Yuri.
Petropavlovsky.

 Yura serve a nord, nella regione di Murmansk. L'esercito si è incontrato bene. Nella città di Pechenga, dove viene servito il giovane, un paesaggio molto bello, la luce del Nord è vista qui. La prima volta che era difficile: i piedi cancellati, tutto era dolorante, ma è andato tutto. I ragazzi intorno alla stanza in un ostello sono tutti dalla regione di Vologda, vivono insieme. Truppe motorizzate. Nella divisione in servizio un sacco di moderni equipaggiamento militarePiù recente impianti di razzo.. Molte volte erano sulla sparatoria, mi è piaciuto molto, e soprattutto - risulta bene. Inoltre, Yura, insieme ai colleghi, è impegnata in riparazione preventiva e formazione delle attrezzature militari. Linee dalla lettera di Yura:
Yura serve a nord, nella regione di Murmansk. L'esercito si è incontrato bene. Nella città di Pechenga, dove viene servito il giovane, un paesaggio molto bello, la luce del Nord è vista qui. La prima volta che era difficile: i piedi cancellati, tutto era dolorante, ma è andato tutto. I ragazzi intorno alla stanza in un ostello sono tutti dalla regione di Vologda, vivono insieme. Truppe motorizzate. Nella divisione in servizio un sacco di moderni equipaggiamento militarePiù recente impianti di razzo.. Molte volte erano sulla sparatoria, mi è piaciuto molto, e soprattutto - risulta bene. Inoltre, Yura, insieme ai colleghi, è impegnata in riparazione preventiva e formazione delle attrezzature militari. Linee dalla lettera di Yura:
 "Ragazzi, per servire nell'esercito è una buona scuola nella vita. Ho maturato, sono stato maturato, acquisito nuovi amici, ha imparato molto! "
"Ragazzi, per servire nell'esercito è una buona scuola nella vita. Ho maturato, sono stato maturato, acquisito nuovi amici, ha imparato molto! "
Materiale preparato da Valentina Syrevnaya Petropavlovskaya, Lyudmila Dobrynina
Dmitry Grose.
 Dima si è laureato alla scuola nel 2004. Ha studiato al St. Petersburg State Mountain Institute che prende il nome da G. V. Plekhanov (Università tecnica), Facoltà - Montagna TPO-10. Il giovane ha chiamato l'esercito il 12 dicembre 2010. Serve nella città di Olengorsk della regione di Murmansk, il genere delle truppe è la fanteria marina. Il servizio è buono. Dima scrive lettere, ma spesso chiama. Dima serve in un bel posto pittoresco. Ci sono un sacco di neve intorno al cerchio, circondano la parte e la collina. Questo paesaggio provoca un senso di ammirazione per la natura locale. Riporta Dima e sulla notte polare, che ora regna nel nord. Leggermente solo 2 ore, all'ora di pranzo, e così costantemente scuro. Il giovane serve solo 2 mesi. Il giuramento ha assunto il 16 gennaio 2011.
Dima si è laureato alla scuola nel 2004. Ha studiato al St. Petersburg State Mountain Institute che prende il nome da G. V. Plekhanov (Università tecnica), Facoltà - Montagna TPO-10. Il giovane ha chiamato l'esercito il 12 dicembre 2010. Serve nella città di Olengorsk della regione di Murmansk, il genere delle truppe è la fanteria marina. Il servizio è buono. Dima scrive lettere, ma spesso chiama. Dima serve in un bel posto pittoresco. Ci sono un sacco di neve intorno al cerchio, circondano la parte e la collina. Questo paesaggio provoca un senso di ammirazione per la natura locale. Riporta Dima e sulla notte polare, che ora regna nel nord. Leggermente solo 2 ore, all'ora di pranzo, e così costantemente scuro. Il giovane serve solo 2 mesi. Il giuramento ha assunto il 16 gennaio 2011.
Materiale preparato Evgeny Chernyshov. Informazioni fornite Love Vyacheslavovna Groshev 
Orizzontalmente:
1. Un grande collegamento di aeromobili. 3. Soldato che sta combattendo sul serbatoio. 5. Questo annunciatore è stato onorato di annunciare l'inizio e la fine del grande
7. Nave militare, che distrugge il trasporto e la nave commerciale. Nome proiettile obsoleto.
11. Soldati del torrente che corrono nell'attacco.
13. Una struttura ampiamente applicabile nella foresta o in anticipo di solito c'era un comando durante il grande patriottico.
15. Segno della pistola.
17. Segna della popolare macchina sovietica in anni per il dopoguerra
19. Le truppe sono atterrate sul territorio del nemico.
21. Auto crawler corazzata.
23. Dall'attrezzatura militare: una piattaforma a piedi, un caricatore.
25. Macchina che cade con viti.
26. Nickname di macchine da jet da combattimento durante il grande Guerra patriottica.
27. Formazione dei militari con questo metodo.
29. Cossa. 31. FirePoint. 33. Nei vecchi tempi, la persona che è stata presa dal servizio di assunzione o servizio di reclutamento.
35. Tipo di sottomarino. 37. Il paracadutista salta con lui dall'aereo.
39. Munizioni esplosive, necessarie per la distruzione di persone e tecniche nemiche con il lancio manuale. 41. Come sono le persone chiamate stivali di soldati?
42. Inaspettato per il nemico un'offensiva.
43. La figura del gruppo del pilota più alto.
45. In quale mese, il popolo russo celebra la vittoria sulla Germania fascista?
Verticalmente:
2. La macchina automatica più popolare della grande guerra patriottica?
3. Macchina da combattimento pesante con una torre e uno strumento su di esso.
4. Minimo minimo di auto-muoversi.
6. Parte di un'arma da fuoco, che riposa sulla sparatoria nella spalla.
8. Titolo militare in esercito russo.
10. In quale mese, la Germania ha attaccato l'USSR?
12. Colpo simultaneo di diverse pistole.
14. Il blocco di questa città era di 900 giorni.
16. Nome del sistema militare. 18. Uno dei più giovani classifiche del mare.
20. La figura del più alto pilotaggio, quando le ali durante il volo dell'aeromobile stanno oscillando.
22. Tipo di truppe. 24. Il tipo di aeromobile al grande patriottico.
25. Unità militare.
26. Il Serviceman che sta studiando in una scuola militare. 28. Titolo del soldato nel nostro esercito.
30. Chi fornisce la comunicazione con la sede?
32. Titolo militare.
34. Il soldato protegge l'oggetto entusiasta, essendo dove?
36. Armi agghiaccianti Alla fine del fucile o della macchina.
37. Cosa studia il soldato nei primi anni di servizio?
38. ha bisogno della mia o della bomba.
40. nave militare: missione squarciata.
42. Diametro, tronco nelle armi da arma da fuoco.
44. Il rango di ufficiale sul comandante della nave.
Cari ragazzi, giovani, giovanili,
insegnanti, papa e nonni!
Congratulo sinceramente con te con questa meravigliosa vacanza.
Oh, quanto è difficile essere un uomo nel nostro secolo,
Sii il migliore, il vincitore, il muro,
Amico affidabile, una persona sensibile carina,
Strategist tra il mondo tra la guerra.
Essere forte, ma ... sottomesso, saggio, molto delicato,
Ricco di essere, e ... non rimpiangere i soldi.
Per essere sottile, elegante e ... incurante.
Tutti sanno tutto e puoi fare tutto.
Auguriamo la tua pazienza durante la tua vacanza
Per risolvere i tuoi compiti di vita.
Salute per te, amore e ispirazione.
Il successo della creatività e di tutti i tipi di buona fortuna!
^
L'ufficio editoriale del giornale grazie per la preparazione della stanza
Amore Vyacheslavovna Groshev, Valentina Yuryevna Petropavlovskaya, Olga Sergeevna Petrov. Grazie per le foto e le storie sui figli.
 ^
Over the Geypaper ha funzionato: O. Metropolskaya, L. Dobrynina, A. Smestova, E. Chernyshov, S. Okunev, A. Selezen, N. Bronnikova
^
Over the Geypaper ha funzionato: O. Metropolskaya, L. Dobrynina, A. Smestova, E. Chernyshov, S. Okunev, A. Selezen, N. Bronnikova
Risposte:
Orizzontalmente:
1 -scadere; 3 cisterna; 5-Lemitan; 7 Raider; 9 core; 11-bang; 13-DUGOUT; 15-macarov; 17-vittoria; 19-terreni; 21-cisterna; 23 -Dex; 25-elicottero; 26.-Katyusha; 27-moistra; 29-Esaul; 31-punti; 33 recluta; 35 atomico; 37-paracadute; 39 melograno; 41-kerzaci; 42-Counter Protection; 43-Rhombus; 45 maggio.
Verticalmente:
2 tagli di capelli; 3-serbatoio; 4-siluro; 6-culo; 8-sergente; 10 giugno; 12 volley; 14-Leningrado; 16-rank; 18-marinaio; 20-Bell; 22 Artiglieria; 24-bombardieri; 25-plotone; 26 cadetto; 28 ordinario; 30 legame; 32 agente; 34 Guardia; 36-baionetta; 37-portali; 38-saperper; 40-esminets; 42-calibro; 44-Capitano.



Piattaforme a piedi a due zampe. Perelman è dedicato. (Versione del 25 aprile 2010) Parte 1. Stabilità delle piattaforme del modello di telaio a due zampe per piattaforme a piedi. Lascia che ci sia una forza F e il punto dell'applicazione c al modello della piattaforma a piedi. Il minimo necessario sarà considerato la forza, tale che gli attaccati al punto c causino il ribaltamento, e quando un cambiamento arbitrario nel punto di applicazione, il ribaltamento sarà impossibile. Il compito è determinare la stima inferiore della forza o dell'impulso, che porterà alla ribaltamento della piattaforma. Per impostazione predefinita, si presume che la piattaforma a piedi debba essere stabile quando si esegue, camminando e in piedi sul posto per tutti i tipi di superficie previsti su cui devi muoversi (di seguito - la superficie sottostante). Modelli di piattaforma. Considera 3 modelli di piattaforme da passeggio e la questione della stabilità sotto l'azione della forza di ribaltamento. Tutti e tre i modelli hanno un certo numero di comunità di proprietà: altezza, massa, forma del piede, altezza del corpo, gamba lunga, il numero di articolazioni, la posizione del centro di massa. Modello Femina. Quando passiamo in avanti attraverso il lavoro del giunto dell'anca sviluppato, mette i piedi uno dopo l'altro, in linea retta. La proiezione del centro delle masse è in movimento rigorosamente lungo la stessa linea. Allo stesso tempo, il movimento in avanti ha un'eccellente scorrevolezza, quasi senza ascensori e discese e senza oscillazioni laterali. Modello mas. Quando si passa avanti, a causa del lavoro dell'articolazione dell'anca sviluppata, le gambe mettono su entrambi i lati della linea condizionale su cui è proiettato il centro di massa. Allo stesso tempo, la proiezione del centro delle masse passa attraverso i bordi interni dei piedi e anche è una linea retta. Quando si passa avanti, previsto piccole oscillazioni su e giù e oscillazioni laterali minori. Deframis del modello. A causa dell'articolazione dell'anca insufficientemente sviluppata è limitata in mobilità. In questo giunto, è possibile esclusivamente spostarsi in avanti, senza la possibilità di girare. Quando si spostano in avanti, sorgono oscillazioni significative, a causa del fatto che il centro delle masse non muove in linea retta, ma secondo una complessa curva tridimensionale, la proiezione di cui per la superficie sottostante forma un sinusoide. Ha due varianti di deformazioni-1 e deformi-2, che differiscono nella struttura del giunto della caviglia. Deframis-1 ha come un aumento (la capacità di inclinare la fase della dimora) e lo swing laterale (la capacità di inclinare il piede a destra ea sinistra). Deframis-2 ha solo sollevatori. Shock di impatto. Considera l'impatto dell'area laterale Jolly sopra l'articolazione dell'anca sul modello di camminata. Questo requisito può essere formulato come segue: il modello deve essere stabile durante la posizione su una gamba. Ci sono due direzioni di direzione: verso l'esterno e all'interno, determinata dalla direzione dal piede al centro della piattaforma. Con una spinta, è sufficiente ritirare la proiezione del centro della piattaforma di massa al di fuori del sito della piattaforma (piedi). Con una spinta all'interno, molto dipende da quanto velocemente puoi mettere la gamba per creare un supporto aggiuntivo. Il modello Femina, per il ribaltamento, è necessario inclinare in modo che la proiezione del centro delle masse abbia superato la metà della larghezza del piede. Con la spinta dentro - almeno una larghezza e mezzo del piede. Ciò è dovuto al fatto che un'eccellente mobilità nell'articolazione consente di mettere la gamba con il modo migliore. Mas Model, per ribaltare, è necessario inclinare in modo che la proiezione del centro delle masse abbia superato la larghezza del piede. Con una spinta dentro - almeno la larghezza del piede. Questo è inferiore al modello Femina a causa del fatto che posizione iniziale Le proiezioni del centro delle masse non erano nel mezzo del piede, ma dal bordo. Pertanto, il modello MAS è quasi lo stesso per lo shock e dentro. Il modello Deformatis, per ribaltare, è necessario inclinare in modo che la proiezione del centro della massa passa da metà a una larghezza del piede. Ciò si basa sul fatto che l'asse di rotazione nella caviglia possa essere posizionato sia al centro del piede che sul bordo. Quando si inclina all'interno, le restrizioni della mobilità nell'articolazione dell'anca non consentono di sostituire rapidamente la gamba nel caso di una spinta. Ciò porta al fatto che la sostenibilità dell'intera piattaforma è determinata dal centro di Dina del centro di proiezione delle masse all'interno dei limiti del supporto già in piedi sulla superficie - il residuo della larghezza del piede. Installazione dell'asse sul bordo, sebbene sia vantaggioso per il POD del PDA di Adoppions, ma provoca frequenti gocce della piattaforma. Di conseguenza, una scelta ragionevole sarà l'installazione dell'asse di rotazione fino al centro del piede. Push di dettagli. Lascia che la spinta entri in un certo punto con la superficie laterale del corpo, con alcuni angoli verso il verticale e orizzontale. Allo stesso tempo, il modello ha già il suo vettore di velocità V. Il modello girerà il lato e girerà attorno all'asse verticale che passa attraverso il centro di massa. Ogni movimento contrasta la forza di attrito. Quando si calcola, non dimenticare che ogni componente della forza (o impulso) agisce sulla sua leva. Per non tener conto della forza di attrito durante la svolta, è necessario raccogliere gli angoli della domanda di forza come segue. Descriviamo intorno alla piattaforma parallelepiped in modo che la sua altezza, larghezza e spessore coincidiamo con l'altezza, la larghezza e lo spessore della piattaforma a piedi. Viene eseguito un segmento, dall'esterno del piede al bordo della costola superiore sul lato opposto della piattaforma. Spingere, ribaltando la piattaforma, produrremo perpendicolare ad esso. Nella prima approssimazione, tale applicazione del vettore ridurrà le forze ribaltabili e rotanti che agiscono sulla piattaforma. Considera il comportamento delle piattaforme sotto l'azione della forza di svolta. Indipendentemente dal tipo di piattaforma, con una spinta, conserva il contatto del piede e della superficie lungo la quale la piattaforma (superficie sottostante) si muove. Supponiamo che l'azionamento guida costantemente riparare in modo affidabile la posizione dei piedi, senza consentire alla piattaforma di ruotare liberamente nella caviglia. Se le forze di attrito non sono sufficienti per evitare la svolta, considerando che c'è una buona presa con la superficie sottostante, è possibile vapore il turno in caviglia. Deve essere ricordato che la velocità della piattaforma V e la velocità che la piattaforma acquisterà sotto l'azione del potere - i valori del vettore. E la loro somma sul modulo sarà inferiore alla somma dei moduli di velocità. Di conseguenza, con una push moderata, muscoli sufficientemente potenti e una mobilità sufficiente nell'articolazione dell'anca, consentendo di sostituire il piede, la velocità della piattaforma V ha un impatto stabilizzante (!) Per le piattaforme Femina e Mas. Stabilizzazione con un giroscopio. Assegniamo che un giroscopio è installato sulla piattaforma passeggiata, a cui è possibile accedere e rallentare per informare la piattaforma ad un momento allo slancio. Un tale giroscopio sulla piattaforma a piedi è necessario per una serie di motivi. 1. Se il piede della piattaforma non ha raggiunto la posizione richiesta e la verticale effettiva non coincide con il passo sicuro richiesto per garantire. 2. Con raffica di vento forti e imprese. 3. Una superficie sottile sottostante può essere deformata sotto i piedi durante un gradino, che porta a una deviazione e inceppamenti della piattaforma nella posizione di un equilibrio instabile. 4. Altri disturbi. Pertanto, nei calcoli, è necessario tenere conto sia della presenza di un giroscopio che di dissipazione energetica. Ma non dovresti fare affidamento esclusivamente sul giroscopio. Il motivo per questo sarà mostrato nella seconda parte. Calcolo sull'esempio. Considera un esempio di una piattaforma a piedi in due fasi da BATTLELECH. A giudicare dalla descrizione, molte piattaforme da passeggio sono create sul telaio di deformazioni-2. Ad esempio, la piattaforma Urbanmech (mediante immagine in Tro3025). Piattaforma di telaio simile Madcat (http://s59.radikal.ru/i166/1003/20/57EB1C096C52.jpg) Si riferisce al tipo di deformazione-1. Allo stesso tempo, nello stesso Tro3025 c'è un modello ragno avendo, a giudicare dall'immagine, un giunto dell'anca molto mobile. Calcola la piattaforma Urbanmech. Bindings a tali parametri: - altezza 7 m - larghezza 3,5 m - lunghezza di un piedino di 2 m - larghezza del piede 1 m - l'altezza del punto dell'applicazione della forza - 5 m - massa 30 T - il centro di Le masse si trovano nel centro geometrico della parallelepipeda descritta. - La velocità di avanzamento della velocità viene ignorata. - La svolta avviene al centro del piede. Pulsante di ribaltamento a seconda della massa e delle dimensioni. L'impulso di ribaltamento laterale viene calcolato attraverso il lavoro. OB \u003d SQRT (1 ^ 2 + 7 ^ 2) \u003d 7,07 m om \u003d ob / 2 \u003d 3,53 m h \u003d 3,5 m delta h \u003d 3,5 * 10 ^ -2 m e \u003d mgh e \u003d m * v * v / 2 m \u003d 3 * 10 ^ 4 kg g \u003d 9,8 m / (sec * s) h \u003d 3,5 * 10 ^ -2 m e \u003d 30.000 * 9,8 * 0,035 kg * m * m / (sec * s) E \u003d 10290 kg * m * m / (sec * s) v \u003d 8.28 * 10 ^ -1 m / s M * V \u003d 24847 kg * M / s Pulse di tornitura è più difficile. Fissare noti: l'angolo tra i vettori di impulso si trova dal triangolo OBP. ALPHA \u003d ARCSIN (1 / 7.07); Alpha \u003d 8.13 gradi. La forza iniziale è piegata in due, che si correla in proporzione alle lunghezze delle leve. Le leve trovano questo: OB \u003d 7.07 La lunghezza della seconda leva prendiamo la metà della larghezza - 3,5 / 2 m. F1 / 7.07 \u003d F2 / 1.75. Dove F1 è il potere della piattaforma di tornitura sul lato. F2 - Potere girendo attorno all'asse verticale. In contrasto con la forza di svolta, il potere della piattaforma di tornitura attorno al suo asse dovrebbe superare la forza dell'attrito. La componente desiderata della forza al punto c può essere trovata da tali considerazioni: F2 \u003d (F4 + F3) F4 - la forza pari al potere dell'attrito durante la rotazione attorno al centro delle masse con il segno opposto, F3 è il residuo. Quindi, F4 è il potere che non fa il lavoro. F1 / 7.07 \u003d (F4 + F3) / 1.75. Dove F1 è il potere della piattaforma di tornitura sul lato. F4 troviamo dalla forza pressata uguale al modulo che pesa la piattaforma e il coefficiente di attrito. Dal momento che non abbiamo dati sul coefficiente del frizione scorrevole, ma si può presumere che non sia migliore della diapositiva in metallo sul metallo - 0.2, ma non peggiore della gomma su ghiaia - 0,5. Il calcolo effettivo dovrebbe includere tenendo conto della distruzione della superficie sottostante, della formazione delle buche e della crescita a forma di salto della forza di attrito (!). Mi limito ancora al valore basso di 0.2. F4 \u003d 3 * 10 ^ 4 * 2 * 10 ^ -1 kg * m / (sec * s) \u003d 6 000 kg * m / (sec * s) Forza può essere trovato dalla formula: E \u003d a \u003d f * d , dove d - il sentiero passò dal corpo sotto l'influenza della forza. Poiché il percorso D non è diretto e la forza è attaccata a diversi punti Varie, quindi verrà preso il calcolo: il percorso nascosto e la proiezione della forza sul piano orizzontale. Il percorso è di 1,75 m. Il componente di streaming della forza sarà uguale a FPR \u003d F * COS (alfa). F1 \u003d 10290 kg * m * m / (sec * s) / 1,75 m \u003d 5880 kg * m / (sec * s) 5880 / 7,07 \u003d (6.000+ F3) / 1.75 di cui F3 \u003d -4544.< 0 (!!) Получается, что сила трения съедает всю дополнительную силу, а значит и работу. Из чего следует, что эту компоненту импульса можно игнорировать. Итого, фиксируется значение опрокидывающего импульса в 22980 кг*м/сек. Усложнение модели, ведение в расчет атмосферы. Предыдущее значение получено для прямоугольной платформы в вакууме. Действительно, в расчетах нигде не фигурируют: ни длинна ступни, ни парусность платформы. Вначале добавим ветер. Пусть платформа рассчитана на уверенное передвижение при скоростях ветра до 20 м/сек. Начнем с того предположения, что шагающая платформа обеспечивает максимальную парусность. Это достигается поворотом верхней части платформы перпендикулярно к потоку воздуха. Согласно (http://rosinmn.ru/vetro/teorija_parusa/teorija_parusa.htm) сила паруса равна: Fp=1/2*c*roh*S*v^2, где с - безразмерный коэффициент парусности, roh - плотность воздуха, S - площадь паруса, v - скорость ветра. Поскольку будем считать, что платформа совершила поворот корпуса, то площадь равна произведению высоты на ширину(!) и на коэффициент заполнения. S = 7*3,5*1/2=12,25. Roh = 1,22 кг/м*м*м. Коэффициент парусности равен 1,33 для больших парусов и 1,13 для маленьких. Будем считать, что силуэт платформы состоит из набора маленьких парусов. Fp=1/2*1,13*1,22*12,25*20*20 кг*м/(сек*сек) = 3377,57 кг*м/(сек*сек) Эта сила действует во время всего опрокидывания, во время прохождения центром масс всего пути в 1/2 ширину стопы. Это составит работу А=1688,785 кг*м*м /(сек*сек). Ее нужно вычесть из работы, которую ранее расходовали на опрокидывание платформы. Перерасчет даст Е=(10290-1689) кг*м*м /(сек*сек). Из чего v = 7,57^-1 м/с; m*v= 22716 кг*м /сек. В действительности нужно получить иное значение импульса. В верхней точке траектории сила, с которой платформа сопротивляется переворачиванию стремится к нулю, а сила ветра остается неизменной. Это приводит к гарантированному переворачиванию. Для правильного расчета нужно найти угол, при котором сила ветра сравняется с силой, с которой платформа сопротивляется переворачиванию. Поскольку сила сопротивления действует по дуге, имеет переменный модуль, то ее можно найти как: Fсопр = Fверт * sin (alpha), где alpha - угол отклонения от вертикали, Fверт - сила которая нужна для подъема платформы на высоту в 3,5*10 ^-2 м. Fверт = 3*10^4*9,8 кг*м/(сек*сек). Alpha = Arcsin(3*10^4*9,8 / 3377,57) = Arcsin(1,15*10^-4) = 0,66 градуса. Теперь путь, который не нужно проходить получается умножением проекции всего пути на полученный синус. А высота подъема исчисляется как разность старой высоты и новой, умноженной на косинус. delta h = ((7,07*cos(0,66) - 7)/2) = 3,47*10^-2 E = 3*10^4*9,8*3,47*10^-2 - 1689+1689*sin(0,66) = 10202-1689+19 = 8532. Из чего v = 7,54^-1 м/с; m*v= 22620 кг*м /сек. Усложнение модели, угол отклонения от вертикали. Дальнейшее усложнение зависит от группы факторов, которые имеют natura diversa Ma portare a un effetto simile. La qualità della superficie sottostante, il rilievo e le abilità pilota determinano come la precisione della piattaforma arriva alla gamba e, di conseguenza, al fatto che l'asse che attraversa il centro delle masse e il centro del piede è completamente deviato da la verticale. Maggiore è la velocità della piattaforma, maggiore è la deviazione attesa dalla verticale. Maggiore è la deviazione media, più piccola è necessario il polso medio per ribaltare la piattaforma. La valutazione accurata di questi parametri richiede esperimenti di campo complessi o costruire un modello completo della piattaforma e del mezzo. Una stima approssimativa ottenuta in un paio di minuti di camminare intorno alla stanza con un piombo consentito il valore medio di 4 gradi. Il valore di 0,66 gradi ricevuto per il vento sarà considerato incluso. Il calcolo di un calcolo simile dell'emendamento per il vento è applicato. Delta h \u003d ((7.07 * cos (4) - 7) / 2) \u003d 2,63 * 10 ^ -2 e \u003d 3 * 10 ^ 4 * 9.8 * 2.62 * 10 ^ -2 - 1689 + 1689 * Sin (4) \u003d 6161. Da quale V \u003d 6.4 ^ -1 m / s; M * v \u003d 19200 kg * m / s. Parte 2. Giroscopi su piattaforme a piedi. Produrremo un'analisi qualitativa della struttura e del dispositivo del giroscopio, nonché dei metodi del suo utilizzo. Lascia che ci sia un po 'di giroscopio con almeno 3 volani. Supponiamo, i volani sono solo 3. Poi se la spinta in una direzione è al vapore la frenata del Gyro, allora la spinta all'altra dovrebbe essere parcheggiata dall'accelerazione del giroscopio. Come vino dei calcoli nella prima parte, il tempo di overclocking è di circa 0,5 secondi. Lascia che non limitiamo il potere dell'unità, che disperde il giroscopio. Poi, nel suddetto caso, è necessario raddoppiare il valore del momento del polso, che, con il peso immutabile del volano, richiederà la contabilità dell'energia immagazzinata. O un aumento di tre volte nella potenza del convertitore. Se mantieni il volano a riposo e l'overclocking è solo al momento della spinta, sembra molto più redditizio in termini di massa del disco. Se ci sono restrizioni sul potere dell'unità, ha senso dividere il volano in 2 parti, ruotando sullo stesso asse in lati opposti. Naturalmente, richiederà un aumento della riserva energetica con lo stesso momento di slancio. Ma il tempo di accelerazione non sarà 0,5 secondi e la pausa è uguale almeno al momento del funzionamento della macchina di ricarica. Per impostazione predefinita, considereremo questo valore a 10 secondi. La diminuzione delle masse del volano è due volte e l'aumento del tempo 20 volte darà l'opportunità di ridurre la potenza dell'unità 10 volte. Tale approccio richiede un dispositivo separato per la calza e lo smaltimento dell'energia termica. Supponiamo che vi sia una trasmissione efficace, ciò eviterà la necessità di installare 3 unità indipendenti, una per ogni asse. Non importa come fosse, ci sono ancora una serie di dipendenze tra le proprietà del giroscopio. Il volano dovrebbe essere posizionato sullo stesso asse con il centro di massa. Questo posizionamento ti consente di scegliere per una piattaforma a piedi valore minimo momento di slancio. Di conseguenza, per una sistemazione ottimale, è necessario installare i volanti come questo: - Il volano che oscilla attorno all'asse verticale - alzato dal centro delle masse o abbassato, - un volano che oscilla e indietro - si sposta a destra o a sinistra, - il volano che oscilla a destra ea sinistra - rimane nel centro di massa. Tale layout si adatta bene alle forr della piattaforma a piedi. Tra i componenti dell'inerzia del volano e dei componenti strutturali del giroscopio, si osservano tali legami: - L'area dell'area dello scafo del giroscopio è proporzionale alla piazza del raggio del volano, l'area sapore del volano è direttamente proporzionale alla piazza del raggio del volano. - La massa del sistema di trasmissione o dei freni è inversamente proporzionale alla massa e al quadrato del raggio del volano (derivato attraverso energia riciclabile). - La massa della sospensione cardanov a due assi o un dispositivo di uno scopo simile è direttamente proporzionale alla massa e al raggio del volano. I momenti della piattaforma e del volano inerzia possono essere trovati nelle seguenti formule. Volano sotto forma di un cilindro cavo: i \u003d m * r * r. Volano sotto forma di un cilindro solido: I \u003d 1/2 * m * r * r. Il momento dell'inerzia dell'intera piattaforma è considerato come in parallelepipedo I \u003d 1/12 * M * (l ^ 2 + k ^ 2). I valori di L e K ogni volta vengono presi da diverse proiezioni. Calcola i valori nell'esempio della stessa piattaforma urbanmech. - Altezza 7 m - larghezza 3,5 m - lunghezza di piedi di 2 m - la larghezza del piede 1 m - l'altezza del punto dell'applicazione della forza - 5 m - la massa di 30 tonnellate - il centro delle masse si trova nel centro geometrico del parallelepipede descritto. - C'è un giroscopio a tre assi con un peso totale di 1 tonnellata. Usando il layout di un Gyro si può dire che metà della larghezza del volano (a destra-sinistra) e la larghezza del volano (avanti e indietro) occupano la metà la larghezza della piattaforma. Avendo rivelato 25 cm. Su ciascun lato sull'armatura, il telaio di trasporto e il caso del giroscopio, otteniamo che il diametro del volano è 3/2 / (1.5) \u003d 1 m. Il raggio è 0,5 m. A una densità di Circa 16 tonnellate / m. Cube È possibile ottenere un volano sotto forma di un cilindro basso cavo. Tale configurazione è molto più preferibile in termini di spesa di massa, piuttosto che un cilindro solido. I momenti dell'Inertia dell'intera piattaforma sono considerati come un parallelepipedo di peso di 30 tonnellate. I1 \u003d 1/12 * M * (L ^ 2 + K ^ 2) \u003d 1/12 * 30000 * (3,5 * 3.5 + 7 * 7 ) \u003d 153125 kg * m * m. I2 \u003d 1/12 * M * (L ^ 2 + K ^ 2) \u003d 1/12 * 30000 * (3,5 * 3.5 + 2 * 2) \u003d 40625 kg * m * m. I3 \u003d 1/12 * M * (L ^ 2 + K ^ 2) \u003d 1/12 * 30000 * (2 * 2 + 7 * 7) \u003d 132500 kg * m * m. Il terzo volano, quello che ruota attorno all'asse verticale, è necessario quando la piattaforma è già caduta per aiutare alzarsi. Di conseguenza, dividiamo la massa dei volanti nel rapporto tra i momenti di inerzia tra i volani. 1 \u003d 61,25 x +53 x +16.25 x. X \u003d 2/261. Il maggior interesse è il volano avanti e indietro. La sua massa può essere definita come masse da 4.06 * 10 ^ -1 di tutti volanti. Lascia che ci sia un disco che sviluppa un potere sufficiente in modo che fosse possibile fare a meno di un sistema di dissipatore di calore e frenata. Lascia che la massa della sospensione, le recinzioni, guidare e il resto saranno 400 kg. Questo valore è possibile, soggetto all'uso di titanio drogato, superconduttori ad alta temperatura e altre comunità ultra-alta velocità. Quindi il momento dell'inerzia del volano sarà: i \u003d m * r * r, m \u003d 243 kg. R \u003d 0,5 kg. I \u003d 60,9 kg * m * m. Allo stesso tempo, i3 \u003d 132500 kg * m * m. Ad un uguale slancio del polso, questo darà il rapporto tra le velocità angolari come da 1 a 2176. Lasciare che la stabilizzazione abbia bisogno di energia pari a 6161 J. La velocità d'angolo della piattaforma sarà: 3.05 * 10 ^ -1 radiante / sec . La velocità angolare del volano sarà 663,68 radianti / sec. L'energia sul volano sarà 13,41 mj! Per confronto: - in termini di almotolo 2,57 kg. - Per BT, un'unità energetica condizionale è definita pari a 100 mj / 15 \u003d 6,66 mj, quindi l'energia sul volano sarà 2 tali unità. In calcolo realistico, è necessario tenere conto di: - l'impulso della spinta può arrivare nella posizione della piattaforma con una deviazione sopra la media, immediatamente dopo il volano del colpo di impulsi, che richiederà energie ancora più elevate A 8 unità condizionali, - in realtà, persino i superconduttori non salveranno la posizione. Troppo alta massa. Per il confronto, l'azionamento in realtà superconduttore 36,5 MW esistente da American Superconductor pesa 69 tonnellate. Lascia che sia possibile presumere che i superconduttori del futuro ridurranno il peso di un'installazione simile per un altro 5 volte. Questa ipotesi deriva dal fatto che la normale installazione moderna di tale potere pesa più di 200 tonnellate. Lascia che sia possibile memorizzare calore nel design del giroscopio e uscirne con un dispositivo indipendente separato. Lasciare il metodo di frenatura, invece del metodo di accelerazione. Quindi la massa di trasmissione sarà 69 * 0,1 * 0,2 tonnellate. \u003d 1,38 tonnellate. Che è molto più di tutta la massa del design (1 t.). Un compenso adeguato per l'impulso per le forze esterne per il lavoro del volano è irreale. Parte 3. Scatto con piattaforme a piedi a due zampe Come si possono vedere dai calcoli realizzati nella prima parte, il valore dell'impulso di ribaltamento è molto grande. (Per il confronto: introduzione impulso dalla pistola 2A26 è 18 * 905 \u003d 16290 kg * m / s.) Allo stesso tempo, se si consentono la compensazione di restituzione solo con l'aiuto della stabilità, quindi una chiusura chiusa del tempo La piattaforma e il colpire la piattaforma porterà a un caduta e un grave danno, anche senza rompere l'armatura. Calcola i modi che consente di mettere uno strumento con un impulso significativo sulla piattaforma, ma senza perdita di stabilità. Lascia che ci sia un dispositivo anti-cifra che dissipa la quantità massima di calore, spesa su questa energia di rollback. O indicò questa energia sotto forma di elettricità, di nuovo, spesa su questa energia di rollback. A \u003d F * D \u003d E, dove f è la forza di attrito (o il suo analogico), D è la lunghezza del percorso di rollback. Di solito puoi mostrare la dipendenza della forza di attrito sulla velocità dell'accoppiamento. Allo stesso tempo, più piccola è la velocità, più piccola è la forza di attrito, con il coefficiente di attrito costante. Supponiamo che ci sia un tale dispositivo dumper, che ti consente di creare la stessa forza di attrito a una velocità di movimento decrescente (!). In modo che la piattaforma non inizi a ribaltare, è necessario che la forza di attrito sia inferiore alla forza con cui la piattaforma resiste a girare. L'angolo tra l'orizzontale e la forza è uguale all'angolo ottenuto in precedenza, in parte, quando è stato determinato l'angolo di casting ottimale. È 8,1 gradi. La forza allegata passa un angolo di 8,1 a 0 gradi. Di conseguenza, da 8.1, è necessario prendere l'angolo medio di deviazione dal verticale uguale a 4 gradi. FSPR \u003d Fast * Sin (Alpha), dove Alpha è l'angolo risultante. Fort \u003d 3 * 10 ^ 4 * 9,8 kg * m / (sec * sec). Alpha \u003d 4,1 gradi. FSPR \u003d 21021 kg * m / (sec * sec). Da ciò è necessario prendere il potere eolico previsto, da C1. Fetra \u003d 3377,57 kg * m / (sec * sec). Il risultato sarà tale: fig \u003d 17643 kg * m / (sec * sec). Il lavoro di questa forza in nessun modo consuma la fornitura di sostenibilità della piattaforma. Inoltre, assumiamo che il trasferimento di peso dal piede alla gamba sia fatto in modo che non aumenti dell'angolo di deviazione. Quindi si può presumere che il potere della resistenza alla svolta non diminuisca. I panni del serbatoio moderni hanno una lunghezza di rollback di circa 30-40 cm. Supponiamo che su una piattaforma a piedi c'è uno strumento con un rollback di 1,5 metri e alcuni che indossano una parte arrotolata. Nella prima forma di realizzazione, 1 metro va a rotolare con l'attrito, i restanti 0,5 metri - per garantire il solitario rollback e il rotolamento. (Come è noto, i dispositivi anti-cifre convenzionali sono progettati principalmente per ridurre la forza e la potenza del rollback.) Quindi A \u003d f * d \u003d E, e \u003d 17643 kg * m * m / (sec * s). Se il peso della parte arrotolata è di 2 tonnellate. Da quale v1 \u003d 4,2 m / s; M1 * V1 \u003d 8400 kg * m / s. Se il peso della parte arrotolata è di 4 tonnellate. Quindi V2 \u003d 2,97 m / s; M2 * v2 \u003d 11880 kg * m / s. Infine, se il peso della parte arrotolata sarà di 8 tonnellate. V3 \u003d 2,1 m / s; M3 * v3 \u003d 16800 kg * m / s. Un peso maggiore della parte laminata provoca dubbi significativi. È necessario un rollback separato di 0,5 metri in modo che la forza che agisca sulla piattaforma durante un colpo non porta alla distruzione. Ciò consentirà di aggiungere al polso all'attrito, parte o l'intero impulso compensato dalla resistenza alla piattaforma. Sfortunatamente, questo metodo aumenta il rischio di cadere la piattaforma quando si entra. Che a sua volta aumenta la probabilità di riparazione seria del telaio e dell'intera attrezzatura sporgente anche senza rotture. La seconda opzione suggerisce che tutti i 1,5 metri andranno a rotolare con l'attrito. Se il peso della parte arrotolata è di 8 tonnellate, quindi e \u003d 3/2 * 17643 kg * m * m / (sec * s), V4 \u003d 2,57 m / s; M3 * v4 \u003d 20560 kg * m / s. Confrontando questo con un valore di 19200 kg * m / s, otteniamo che un tale paio di numeri è abbastanza simile alla verità. Con tale combinazione di fattori, è possibile ribaltare la piattaforma solo nel caso dello strumento dal limite in base alle caratteristiche da una breve distanza. Altrimenti, l'attrito dell'aria ridurrà la velocità del proiettile, e quindi l'impulso. Il tasso di tiro massimo è determinato dalla frequenza dei passaggi. Per impostazione fiduciosa, sono necessari due passaggi. Credere che la piattaforma possa eseguire 2 gradini al secondo, il divario minimo tra il Volley sarà 1 sec. Questo divario è molto meno del tempo di funzionamento delle moderne macchine di ricarica. Di conseguenza, le prestazioni di cottura della piattaforma a piedi saranno determinate dalla macchina di ricarica. Le pistole BT sono suddivise in classi. Il più pesante (AC / 20) deve avere la velocità del proiettile di circa 300-400 m / s., Operando dall'intervallo di destinazione del tipo di piattaforma di destinazione. Prendendo un'opzione con un impulso di 20560 kg * m / s. e velocità 400 m / s. Abbiamo un sacco di proiettili in 51,4 kg. L'impulso di gas in polvere viene ignorato, presumeremo che sia completamente estratto dal freno DOOL.
La "tenda di ferro" tra l'Oriente e l'Occidente crollò, ma il ritmo di sviluppo delle attrezzature militari come risultato di ciò non solo non solo non è stato sostituito, ma addirittura accelerato. Quale sarà l'arma di domani? Il lettore troverà il lettore nel libro proposto, in cui le informazioni vengono raccolte sugli esempi più interessanti di attrezzature e progetti militari sperimentali, l'attuazione di cui deve essere nel prossimo secolo. Con molti fatti, il lettore russo sarà in grado di incontrarsi per la prima volta!
Artisti
Artisti
È così che il campo di battaglia è descritto in uno dei libri futuristici: "... I segnali radiofonici dai satelliti di comunicazione hanno avvertito il comandante della preparazione dell'offensiva dell'avversario. La rete di sensori sismici installati ad una profondità di diversi metri ha confermato questo. Registrando le fluttuazioni del suolo, i sensori sono codificati i segnali inviare informazioni a un computer di punzonatura. Quest'ultimo ora sa abbastanza accuratamente, dove si trovano i carri armati e l'artiglieria nemica. I sensori filtrano rapidamente i segnali acustici ottenuti da oggetti militari di diverse masse, e secondo lo spettro di vibrazione, si distinguono per pistole artiglieria da portatori di personale corazzato. Impostando la disposizione dell'avversario, il computer del personale decide sull'applicazione del confrudo del fianco ... davanti al campo imminente è estratto, e c'è solo un corridoio stretto. Tuttavia, il computer si è rivelato ad astuzia: determina il computer con una precisione di millesimi frazioni, quale delle miniere dovrebbe esplodere. Ma questo non è abbastanza: le miniature miniature miniature miniature chiuse la strada del ritiro dietro l'avversario. Saltando, queste miniere iniziano a spostare Zigzago, soffiando solo quando trovano fuori - per massa del metallo, - che colpiscono il serbatoio o la pistola dell'artiglieria. Allo stesso tempo, lo sciame del piccolo aereo Kamikoky è caduto sul bersaglio. Prima di colpire, inviano una nuova porzione di informazioni sulla situazione sul campo di battaglia ... coloro che riescono a sopravvivere in questo diavolo dovranno affrontare i soldati dei robot. Ognuno di loro, "sentimento", ad esempio, l'approccio del serbatoio, inizia a crescere come un fungo, e apre gli "occhi", cercando di trovarlo. Se l'obiettivo non appare all'interno del raggio di cento metri, il robot è diretto verso di esso e attacca uno dei piccoli missili, che sono armati ... ".
Gli specialisti vedono il futuro della robotica militare principalmente nella creazione di veicoli da combattimento che possono agire autonomamente, oltre a "pensare".
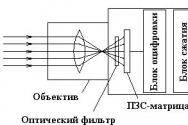
Tra i primi progetti, nel quadro di questo settore, un programma può essere portato a creare un veicolo autonomo dell'esercito (PMP). Un nuovo veicolo da combattimento assomiglia ai modelli di fantastici film: otto piccole ruote, un caso ad alto blindato senza slot e oblò, annegamento nella telecamera televisiva nascosta in metallo. Questo vero laboratorio informatico è creato per sperimentare modi di gestione autonoma del computer di batterli basati sul terreno. Gli ultimi modelli AAATS sono utilizzati per l'orientamento già diverse telecamere televisive, un localizzatore ad ultrasuoni e laser a onde sfuse, raccolti da cui i dati vengono raccolti in una "immagine" chiara non solo ciò che è al tasso della ritenzione, ma anche intorno al robot . Il dispositivo deve ancora essere appreso per distinguere le ombre dagli ostacoli attuali, perché per la telecamera con controllo del computer, l'ombra dell'albero è molto simile all'albero caduto.
È interessante considerare gli approcci ai progetti che partecipano al progetto per creare un PMP e le difficoltà con cui hanno riscontrato. Il movimento dell'agente ottale, che è stato discusso sopra, viene effettuato utilizzando i segnali di elaborazione dei computer laterali da vari mezzi Percezione visiva e utilizzando una mappa topografica, nonché una base di conoscenze con dati sulla tattica di movimento e algoritmi per le conclusioni di uscita relative alla situazione attuale. I computer determinano la lunghezza del percorso di frenatura, la velocità sulle rotazioni e altri parametri necessari del movimento.
Durante i primi test dimostrativi, la società si è trasferita lungo una strada fluida ad una velocità di 3 km / h utilizzando una singola camera televisiva, grazie ai quali le informazioni di scarico sviluppate in Maryland University sono state riconosciute dal ciglio della strada della strada. A causa delle basse prestazioni dei computer dei computer PMP, è stato costretto a fare fermati ogni 6 m. Per garantire un movimento continuo ad una velocità di 20 km / h, le prestazioni del computer devono essere aumentate 100 volte.
Secondo gli esperti, i computer svolgono un ruolo chiave in questi sviluppi e le principali difficoltà sono correlate al computer. Pertanto, per ordine, l'Uppnier dell'Università di Carnegie Mellon ha iniziato a sviluppare un computer ad alte prestazioni dell'ordito, destinato, in particolare, per il PMP. È destinato a stabilire un nuovo computer su un'auto appositamente prodotta per il controllo autonomo di loro per le strade adiacenti all'università per il movimento a una velocità fino a 55 km / h. Gli sviluppatori stanno attento nel rispondere alla domanda, se il computer sarà in grado di sostituire completamente il conducente, ad esempio, quando si calcola la velocità della strada che attraversa la strada con giovani e vecchi pedoni, ma sono fiduciosi che sarà meglio affrontare Con tali compiti come la scelta del percorso più breve sulla mappa.
La società "General Electric" ha ordinato un kit software che consentirà all'AATS di riconoscere i dettagli del terreno, delle autoveicoli, dei veicoli da combattimento, ecc. In una nuova serie di programmi, si presume utilizzare il riconoscimento delle immagini sulle caratteristiche geometriche di L'oggetto di ripresa confronta con le immagini di riferimento, memorizzato nella memoria del computer. Poiché l'immagine di ciascun oggetto riconoscibile (serbatoio, pistole, ecc.) Richiede elevati costi del lavoro, l'azienda è andata lungo il modo di sparare oggetti da fotografie, disegni o layout in tipi diversiAd esempio, davanti e sul lato, e le immagini sono digitalizzate, rintracciate e trasformate in una forma vettoriale. Quindi, con l'aiuto di algoritmi speciali e pacchetti software, le immagini risultanti vengono convertite nella vista volumetrica dell'oggetto, che viene inserito nella memoria del computer. Quando il PPC si muove, le sue telecamere a bordo fanno un colpo di un oggetto che cade sul percorso, l'immagine di cui durante l'elaborazione è presentata sotto forma di linee e punti di convergenza nei luoghi dei cambiamenti a contrasto taglienti. Quindi, quando si riconoscono, queste cifre sono confrontate con le proiezioni degli oggetti inseriti nella memoria del computer. Il processo di riconoscimento è considerato condotto con successo con una coincidenza abbastanza accurata di tre a quattro segni geometrici dell'oggetto, e il computer produce ulteriori analisi più dettagliate per aumentare la precisione del riconoscimento.
I successivi test più complessi su terreni accidentati sono stati associati all'introduzione di diverse camere televisive al PMP per garantire la percezione stereoscopica, nonché un localizzatore laser a cinque frame, che ha dato l'opportunità di valutare la natura degli ostacoli al movimento, per il quale I coefficienti di assorbimento e riflessione e la riflessione della radiazione laser in cinque sezioni di spettro elettromagnetico.
Uppnier ha inoltre assegnato fondi per lo sviluppo dell'Università Oh Sea per creare un ATEC con sei supporti anziché ruote per muoversi intorno al terreno accidentato. Questa macchina ha un'altezza di 2,1 m, una lunghezza di 4,2 m e una massa di circa 2300 kg. Simili robot auto-propulliti di vari scopi sono attivamente sviluppati da 40 aziende industriali.
Il concetto del veicolo da combattimento senza sangue è il più chiaramente, il cui compito principale è la protezione di oggetti importanti e pattuglia, è incorporato nel robot di combattimento americano "Agroiler". Ha un controllo combinato, eseguito sul telaio a sei ruote motrici, dotato di un rangefinder laser, dispositivi di visione notturna, Doppler RLS, tre camere televisive, una delle quali può salire a un'altitudine fino a 8,5 m utilizzando un albero telescopico, Così come altri sensori che consentono di rilevare e identificare eventuali violatori della zona protetta. Le informazioni vengono elaborate utilizzando una macchina di elaborazione a bordo, nella memoria di cui vengono posati i programmi del movimento autonomo del robot su un percorso chiuso. In modalità autonoma, la soluzione per distruggere l'intruso viene ricevuta utilizzando un computer e nella modalità di gestione televisiva - l'operatore. In quest'ultimo caso, l'operatore riceve informazioni sul canale TV da tre telecamere e i comandi di controllo vengono trasmessi sulla radio. Va notato che nel sistema di telegrado robot, gli elementi di controllo vengono utilizzati solo durante la diagnosi dei suoi sistemi, per i quali l'operatore ha un monitor speciale. L'armamento del "gestore" è un launcher granata e due mitragliatrici.
Un altro robot militare, il nome "Dex", può immergere e scaricare gusci di artiglieria. E altre munizioni, i carichi di trasferimento pesano più tonnellate, bypassare il legame. Come indicato nella relazione analitica della Rand Corporation, secondo i calcoli preliminari, il costo di ciascuno di questi robot è stimato a $ 250 mila (per il confronto - il serbatoio principale forze di terra Gli Stati Uniti Abrams ML costano un Pentagono di $ 2,8 milioni).

"ADEX" è una piattaforma per passeggiate con sei supporti, ciascuno, ciascuno, ciascuno, ciascuno è guidato da tre motori elettrici e il controllo viene effettuato utilizzando sei microprocessori (uno per ogni supporto) e coordinando la loro elaborazione centrale. Proprio nel processo di movimento, la larghezza del robot può variare da 540 a 690 mm e l'altezza è da 910 a 1980 mm. Il telecomando è realizzato tramite radio. Ci sono anche messaggi che sulla base di questa piattaforma, è stata creata una variante di un robot che agisce sia sulla terra che nell'aria. Nel primo caso, il robot si muove con l'aiuto di tutti gli stessi supporti, e nel secondo movimento fornisce lame speciali, come un elicottero.
Per le forze navali americane, i robot NT-3 per cargo pesante e robard-1, fires di fissaggio, sostanze di avvelenamento e una tecnica nemica che penetra attraverso la prima linea, e ha già creato un dizionario di 400 parole attraverso la prima linea. Robart-1, inoltre, è in grado di raggiungere la stazione di riempimento per ricaricare le batterie. Una spedizione ampiamente pubblicizzata al luogo della morte del famoso "Titanic", che si è tenuto nel 1986, aveva un obiettivo principale nascosto - la prova del nuovo robot sottomarino militare "Jason Jr.".
Negli anni '80, apparivano speciali macchine da combattimento senza sangue, eseguendo solo compiti di intelligence. Questi includono Intelligence Combat Robots TMAR (USA), "Skout Team" (USA), ARVTB (USA), ALV (USA), Rova (Regno Unito) e altri. Un'auto TMAR a quattro ruote di piccole dimensioni a forma di sangue con una massa di 270 kg è in grado di condurre la ricognizione in qualsiasi momento del giorno utilizzando una fotocamera, dispositivi di visione notturna e sensori acustici. È anche dotato di un designatore target laser.
La "SCOUT TEAM" è una sedia a rotelle con telecamere calid-by-thelion, vari sensori e manipolatori di controllo del movimento. Comando ha implementato il controllo combinato: nella modalità Gestione televisiva, i comandi provengono dalla macchina di controllo posizionati su un rimorchio, offline - da tre macchine di elaborazione a bordo utilizzando una mappa dell'area digitale.
Sulla base del Caterpillar BTR M113A2, è stata creata una macchina da addestramento da combattimento non torta ARVTB, che ha un sistema di navigazione e strumenti di osservazione tecnica. Come la "squadra Scout", ha due modalità di funzionamento - Gestione televisiva con il trasferimento di comandi sulla radio e autonomo.
In tutti i suddetti robot di intelligenza sono usati mezzi tecnici Controllo di due tipi. Nella modalità di controllo remoto, viene utilizzata una gestione televisiva del supervisore (in base ai comandi generalizzati dell'operatore, incluso il discorso del discorso) e il controllo offline - adattabile con la limitata capacità dei robot per adattarsi alle modifiche nell'ambiente esterno.
La macchina di ricognizione ALV è più perfetta rispetto ad altri sviluppi. Nelle prime fasi, ha anche avuto un sistema di controllo del software con elementi di adattamento, ma in futuro, sempre più elementi sono stati introdotti nei sistemi di controllo. intelligenza artificialequella aumentata autonomia durante la risoluzione delle missioni da combattimento. Prima di tutto, "Intellettualizzazione" ha toccato il sistema di navigazione. Indietro nel 1985, il sistema di navigazione ha permesso alla macchina ALV di passare in modo indipendente una distanza pari a 1 km. È vero, quindi il movimento è stato effettuato in base al principio della ritenzione automatica del dispositivo nel mezzo della strada utilizzando le informazioni dalla camera dell'indagine televisiva dell'area.
Per ottenere le informazioni sulla navigazione nella macchina ALV, è installata una camera televisiva a colori, i sensori acustici che producono l'ecolocazione vicino agli oggetti, nonché un localizzatore di scansione laser con range accurato di intervallo di ostacoli e visualizzazione della loro posizione spaziale. Gli esperti americani si aspettano di garantire che l'auto alv possa scegliere in modo indipendente un percorso razionale del movimento di fondo, ignorare gli ostacoli e, se necessario, cambia la direzione e la velocità del movimento. Dovrebbe essere una base per creare un veicolo da combattimento senza sangue completamente autonomo in grado di produrre non solo esplorazione, ma anche altre azioni, compresa la sconfitta della tecnologia di combattimento del nemico da varie armi.
Per i moderni robot da combattimento - armi, due sviluppi americani includono: "Robotik Ranger" e "Demone".
"Robotik Ranger" è una macchina a quattro ruote con un'elettrotrasmissione, che può ospitare due impostazioni di trigger o mitragliatrice. La sua massa è di 158 kg. La gestione televisiva viene eseguita in base al cavo in fibra ottica, che fornisce un'immunità ad alta rumorosità e consente di gestire simultaneamente il gran numero di robot sulla stessa area del terreno. La lunghezza del cavo in fibra di vetro consente all'operatore di manipolare il robot a una distanza fino a 10 km.
Nella fase di progettazione c'è un altro "Ranger", che è in grado di "vedere" e ricordare la sua traiettoria e mosse attraverso un terreno accidentato non familiare, aggirando gli ostacoli. Il campione di prova è dotato di un intero set di sensori, incluse telecamere, un localizzatore laser che trasmette un'immagine surround del terreno e un ricevitore di radiazioni a infrarossi che consente di muoversi di notte. Dal momento che analizzare le immagini ottenute dai sensori, ci sono enormi calcoli, il robot, come gli altri, è in grado di muoversi solo a bassa velocità. Vero, non appena i computer appaiono con una velocità sufficiente, la sua velocità si spera di aumentare a 65 km / h. Con ulteriori miglioramenti, il robot può osservare costantemente la posizione del nemico o entrare in battaglia come una macchina del serbatoio, armata con uno strumento estremamente con il venditore laser.
Il vettore di piccole dimensioni dell'arma "Demone" con una massa di circa 2,7 tonnellate, creata negli Stati Uniti, alla fine degli anni '70 - i primi anni '80, si riferisce alle macchine combinate per combattimento a ruota senza sangue. È dotato di un PTTHI (otto o dieci unità) con teste termiche di homing, una stazione radar per il rilevamento di obiettivi, il sistema di identificazione del "suo estraneo", nonché la macchina computing a bordo per risolvere i problemi di navigazione e la gestione delle strutture di combattimento. Quando si estende alle frontiere di cottura e su larghe gamme prima del bersaglio, il "demone" funziona nella modalità di controllo remoto, e quando si avvicina gli obiettivi, la distanza inferiore a 1 km si sposta sulla modalità automatica. Successivamente, il rilevamento e la sconfitta dell'obiettivo sono fatti senza la partecipazione dell'operatore. Il concetto di modalità di gestione della televisione dei veicoli "Demone" è stato copiato con gli elementi di fissaggio tedeschi menzionati sopra la seconda guerra mondiale: la gestione di una o due macchine "demoni" conducono l'equipaggio di un serbatoio appositamente attrezzato. La modellizzazione matematica delle ostilità condotte da specialisti americani ha dimostrato che le azioni congiunte dei serbatoi con le macchine "demone" aumentano le prestazioni della potenza di fuoco e la sopravvivenza delle unità di serbatoio, specialmente in una battaglia difensiva.
Ulteriori sviluppi Il concetto di uso integrato di gestito in remoto e con l'equipaggio dei veicoli da combattimento è stato ottenuto nei lavori sul programma RCV ("Robot Combat Machine"). Fornisce lo sviluppo di un sistema costituito da una macchina di gestione e da quattro veicoli da combattimento robotizzati che svolgono varie attività, anche per distruggere gli oggetti con l'aiuto di PTTI.
Contemporaneamente con robot portanti mobili leggeri, le armi più potenti vengono create all'estero. combattere, in particolare, un serbatoio robotico. Negli Stati Uniti, questi lavori sono stati condotti dal 1984, e tutte le attrezzature per la ricezione e l'elaborazione delle informazioni sono fabbricate nella versione blocco, che consente al consueto serbatoio di trasformarsi in un serbatoio del robot.
Nella stampa patriottica, è stato riferito che i lavori simili vengono effettuati in Russia. In particolare, i sistemi sono già stati creati, che, se installati sul serbatoio T-72, consentono di agire in modalità completamente offline. Ci sono test di attrezzature correnti.

Lavoro attivo sulla creazione di veicoli da combattimento antifurto negli ultimi decenni ha portato gli specialisti occidentali alla conclusione sulla necessità di standardizzare e unificare i loro nodi e sistemi. Questo è particolarmente vero per il telaio e i sistemi di controllo del movimento. Le varianti esperte di macchine da combattimento antifurto non hanno più un obiettivo chiaramente pronunciato, ma sono utilizzati come piattaforme multiuso che possono essere installate apparecchiature di ricognizione, varie armi e attrezzature. Questi includono le già menzionate "Robotik Ranger", AIV e RCV, così come la macchina RRV-1A e il robot ODEX.
Quindi i robot dei soldati saranno sostituiti sul campo di battaglia? Ci saranno macchine con menti artificiali, il luogo delle persone? Enormi ostacoli tecnici devono essere superati prima che i computer possano svolgere compiti eseguiti da una persona senza alcuna difficoltà. Quindi, ad esempio, per rendere la macchina il più comune " buon senso"Avrai bisogno di aumentare la capacità della sua memoria per diversi ordini di grandezza, accelerare il lavoro anche dei computer più moderni e sviluppare un software brillante (non penserete a un altro word). Per uso militare, i computer devono essere molto più piccoli ed essere in grado di resistere condizioni di combattimento. Ma sebbene l'attuale livello di sviluppo dell'Intelligenza artificiale non ti consente di creare un robot completamente autonomo, gli specialisti ottimistici valuta le prospettive per la futura robotizzazione del campo di battaglia.